西安电子科技大学专区
基本信息
- 作品名称:
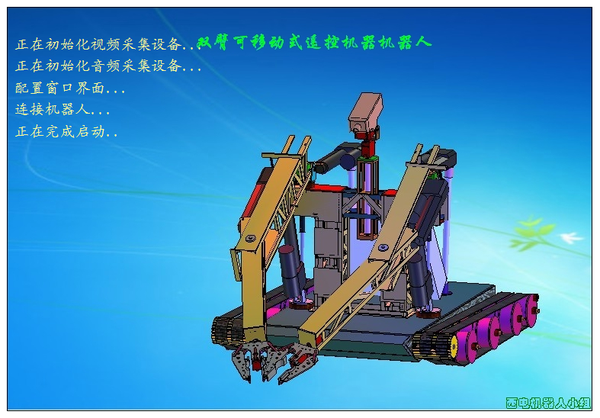
- 双臂可移动式遥控机器人
- 大类:
- 科技发明制作B类
- 小类:
- 机械与控制
- 简介:
本项目是一台履带式双机械臂机器人,主要可执行地震救援、排爆、特殊环境检测和侦查等危险工作。双机械臂采用电动推杆驱动,单臂负载力达到30kg。结合短距离和中远距离无线传输方式,保障机器人在1500m范围内的无线控制。该机器人可携带有效载荷150kg,最大速度为35m/min,攀爬30°斜坡。利用机器人运动学方程的正、逆解,结合控制算法解决了双臂干涉问题。采用拟人化的控制方式,提高机器人可控性。
- 详细介绍:
该机器人涉及到机械、电子、计算机、自动控制、无线通信以及图像处理等多项领域。其具有三大功能:远程救援排爆探测、实时监控和信息反馈。
基本思路是通过对双机械臂的驱动设计和结构设计,提高双机械臂的动作能力和负载力,简化机器人的结构和加工复杂度;采用一种拟人化的控制方式,提高多自由度机器人的可控性;通过对机器人控制系统、通信系统和机械结构的高安全性和高稳定性设计,提高机器人整体的稳定性和安全性。
创新点主要在机械臂的结构设计和驱动设计上,突破了传统机械臂直流伺服电机或步进电机的驱动模式,创造性的采用电动推杆进行驱动,一方面增加了机械臂的动作能力,另一方面简化了机械臂结构及加工复杂度。在对双臂机械手的控制方式上,采用两种不同的无线数据传输技术,实现了手臂和手部动作信息采集无线数据传送,以及机器人运动参数及动作控制命令的无线数据传送,将短距离数据传输和中远距离数据传输很好的结合起来,提高控制的便携性。在机械臂动作控制方法上也有很好的创新设计,由于双机械臂的动作控制限定条件远远超过单臂机械臂,因此,控制程序的复杂度较高。本作品较好的解决了这方面的问题。
关键技术主要有高强度的机械结构设计,高精度涡轮蜗杆控制技术,高稳定性的控制电路设计,远距离无线通信技术,多任务实时处理系统。
本机器人长1100mm,宽700mm,高500mm,重75kg,双机械臂采用电动推杆提供动力,双臂具有10个自由度,单臂负载力达到30kg,手臂长1000mm。可依靠两履带的差速转动实现快速转向或原地转向。结合短距离和中远距离无线传输方式,保障机器人在1500m范围内的无线控制。该机器人可携带有效载荷150kg,最大速度为35m/min,可在草地、沙滩等复杂路面上行走,攀爬30°斜坡。利用机器人运动学方程的正、逆解,结合控制算法解决了双臂干涉问题。车载视觉监测系统可对周围360°范围里的情况进行实时监视。电源系统采用铅酸动力电池组供电,供电时间为2—3小时。双机械臂采用拟人化的控制方式,提高机器人可控性。- 获奖情况:
第十二届“挑战杯”作品 二等奖
第八届西安高新“挑战杯”陕西省大学生课外学术科技作品竞赛特等奖