西理工专区
基本信息
- 作品名称:
- 基于无人机航测数据分析的灾后救援系统
- 大类:
- 科技发明制作A类
- 小类:
- 信息技术
- 简介:
无人机的空中飞行优势,使得其在人员无法靠近的灾区救援中发挥了重大作用。为此,本作品设计并实现了以可移动空中支架模拟无人机,沙盘模拟航测区域的无人机航测图像分析处理实体模型,实现了多尺度分层拼接的全景及细节图像重构,场景的三维地貌重建;给出了无人机的系统导航及地面指挥导航两种模式,以适应救灾需求;实现了地面目标的空中查找等功能。通过对航测数据的分析处理,为救援人员提供及时有效的信息。
- 详细介绍:
无人机的空中飞行优势,使得其在人员无法靠近的灾区救援中发挥了重大作用。为此,本作品设计并实现了由模拟无人机的加载摄像头的可控移动空中支架,以及模拟现场的沙盘构成的无人机航测图像采集及分析处理实体模型。
系统对无人机航测数据的分析处理包括了无人机的航测图像全景图及局部区域细节图形的重构,场景的三维地貌重建,无人机的系统导航及地面指挥导航两种模式,以及地面目标的空中查找定位等功能。
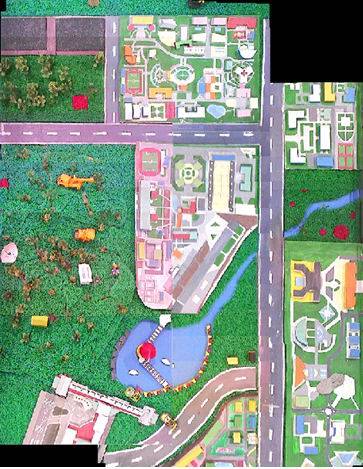
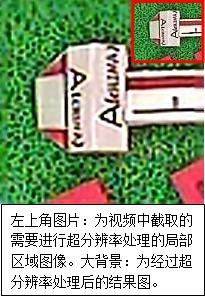
无人机的航测图像全景图及局部区域细节图形的重构采用了多尺度分层拼接的方法完成,对大视场的数据采用降采样方式重建,最大限度地获取航测区域的全景概貌图像;对指定区域,由视频关键帧采用保采样方式重建,确保重建图像具有较高的清晰度,视频关键帧由数据库进行管理,根据指定区域的位置信息进行调用;对重点关注区域,采用超分辨率重建方式重建,以对重点区域的细节信息进行清晰化增强处理。
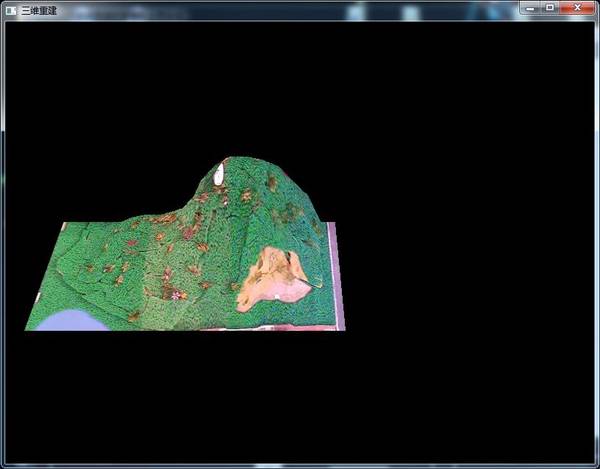
场景的三维重建,则通过在空中支架上加载微波测距传感器模拟无人机的高程检测装置,获取沙盘上目标的三维信息并进行重建,以获得现场的地形地貌,以及灾区出现的动态变化的塌方等信息。
无人机的系统导航由系统指定路线盘旋航测,无人机根据系统给定的路线飞行并返航;地面指挥模式,则由无人机实时检测指定的可移动的目标实现相应的导航移动。
地面目标的空中查找定位,实现了能够适用于复杂的地形的目标检测方法,以检测在复杂地形中散落的物质,失踪的目标等。在检测定位到目标之后,根据无人机所在当前位置,发送相应的信息给系统,以及救援人员所持的无线手持信息终端,以便实施及时救援。- 获奖情况:
第十二届“挑战杯”作品 三等奖
2010年11月,获西安理工大学自动化与信息工程学院,第十八届“理奥杯”科技节特等奖。
2010年11月,获西安理工大学第十九届大学生课外学术科技作品竞赛一等奖。
2011年6月,获第八届西安高新“挑战杯”陕西省大学生课外学术科技作品竞赛一等奖。