西工大专区
基本信息
- 作品名称:
- 智能自主控制飞翼布局无人机验证系统
- 大类:
- 科技发明制作A类
- 小类:
- 机械与控制
- 简介:
该作品采用新型“W”无尾飞翼布局,控制舵面由十组互为独立的分布式控制舵面构成,其中四组舵面组成新型分裂式阻力方向舵。作品主要由无人机机体、动力系统、起落装置以及智能飞行导航控制系统组成。具有良好的开放性,为用户提供较好的飞行实验与验证平台,在实验教学、国防建设与民用航空领域均具有较强的应用与发展前景。
- 详细介绍:
本作品采用“W”型式飞翼气动布局,飞翼气动布局具有其独特的气动优势,现代飞行控制系统的快速发展使得这类布局在有人机和无人机上运用越来越广。飞翼布局自然安定性比常规布局飞机差,这对飞行控制方式、飞控系统以及核心控制算法提出巨大挑战。本作品针对飞翼布局飞行器的气动设计及其飞控系统,自主设计并制作了飞翼布局无人验证机,并完成飞行实验、飞行参数实时采集、模型辨识以及自主飞行控制系统的研发工作;
飞翼翼剖面使用反弯度翼型以增加纵向静稳定性和设计状态附近俯仰力矩接近零的自配平能力。飞翼布局无垂直尾翼和传统的方向舵,航向稳定性趋近中立稳定,航向控制方式采用新型的阻力方向舵控制。该舵面配置在距离飞机对称面较远位置,靠近翼梢。当单侧上下舵面张开一定角度时,作用在飞机上的非对称阻力将产生偏航控制力矩;当飞机左右两侧的阻力方向舵同时上下张开较大角度,可增加飞机气动阻力,起到减速效果,可参与飞机速度控制,如空中加油减速控制、进场降落减速控制以及降落接地后滑行时作为减速板使用。
本作品开发了MIMU/GPS/磁强计微型组合导航系统,对GFMIMU/GPS 组合导航信息融合技术进行了研究,运用了基于模型误差预测的扩展卡尔曼滤波MEP-EKF方法。在AHRS,运用了模型预测卡尔曼滤波算法,这种对AHRS的扩展卡尔曼滤波可以实现对连续的非线性动态系统的状态进行估计,并结合四元数法通过已测得的参数可以较精确的实时估计出飞行器的姿态角,并通过三轴磁力计所测得的磁偏角以及三轴温度计测得的温度对姿态角进行校正和补偿,进一步缩小姿态角误差,从而提高控制系统的控制精度和控制效率。
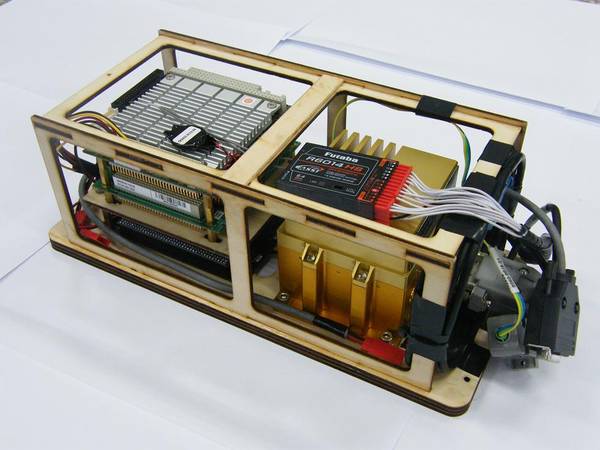
本作品的数据处理核心采用PC104模块,DSP采集的信号通过串口传输给PC104,PC104在存储PWM信号的同时将采集到的飞行姿态信息进行处理,在线解算控制律,并产生PWM波控制舵机,从而实现对飞行器的控制,下图为控制系统硬件构成,PC104作为机载数据处理及控制核心,对飞机进行配平、姿态控制和航向纠偏。
选用Visual Basic作为地面站开发软件,飞机上的无线数传系统实时地将飞机姿态、舵偏角、飞行速度、高度、GPS信息传输到地面站,地面站再将所有数据进行汇总、显示,工作人员可以在地面站设定各种参数将设定值通过无线数传设备发送到机载控制系统,实现对飞机进行操纵、控制以及航路规划,同时地面站还要监控飞机上控制系统是否工作正常,如出现故障应立即报警并切换到手动遥控状态。
本作品研制了一套功能齐全,操作简单,使用方便的智能飞翼布局无人机系统,为智能无人机系统设计者和核心算法研究工作者,提供飞行验证和调试的试验平台,将为系统的研制节约成本,缩短周期。
目前本系统功能还在不断扩展完善,本团队正在无尾飞翼布局无
人机的全自主起飞、降落回收、UAV多机编队任务飞行、UAV中继、UAV舰载起降等方向继续进行深入研究。- 获奖情况:
第十二届“挑战杯”作品 三等奖
2010 年“雪野湖”杯科研类全国航空航天模型锦标赛《无尾布局飞机阻力舵动力学设计与验证》国家二等奖