重庆交通大学专区
基本信息
- 作品名称:
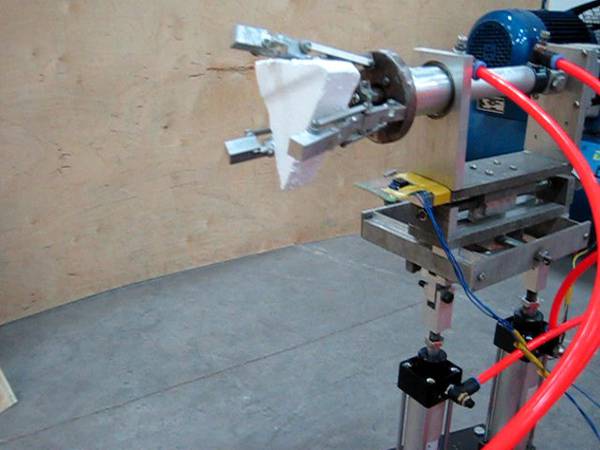
- 仿手指的自适应柔性夹具
- 大类:
- 科技发明制作B类
- 小类:
- 机械与控制
- 简介:
在工业生产过程中,工件的装夹往往是一对一进行的。目前,市面上还没有出现一对多的夹具,这极大的影响了企业的生产效率和效益。 仿手指的自适应柔性夹具就是针对这一情况量身定做的。这种自适应柔性夹具能在一定范围内,对于形状复杂的工件,这个夹具都能完成比较精确的装夹。
- 详细介绍:
本作品主要解决的问题: 1、能夹持复杂形状的工件(异形工件)。 2、一次装夹,多面加工,可以使用在数控铣床中。 3、一种夹具能装夹多种类型工件,实现一对多的工件装夹。 本作品是一种采用步进电机驱动的模块化柔性夹具,其结构简单,控制方便,驱动能力好,夹持灵活。同时可以实现两种不同角度的夹持,它由移动系统、夹持系统、气压系统、电源系统四个部分组成。用ADC模数转化器把倾角传感器的模拟信号转换成数字信号输入单片机,控制者就通过单片机输出的电压对角度进行控制,这样就能更准确的夹持多个方向的工件了。
- 获奖情况:
第十二届“挑战杯”作品 三等奖
无