大连理工大学专区
基本信息
- 作品名称:
- RoboCup小型组足球机器人竞赛及实验平台
- 大类:
- 科技发明制作A类
- 小类:
- 机械与控制
- 简介:
小型组轮式机器人足球比赛是RoboCup机器人足球世界杯赛的主要项目之一,同时也是机器人技术和人工智能理论的良好的实验平台。本项目设计制作的RoboCup小型组足球机器人竞赛及实验平台,可作为小型组足球机器人竞赛的标准平台推广应用,也可以作为功能完备的竞赛系统直接参加机器人足球比赛,还可在此基础上开展机器人技术实验研究,为机器人技术新算法、新模型提供创新实验平台。
- 详细介绍:
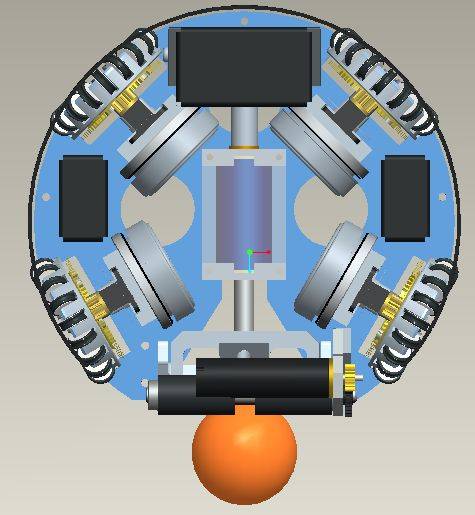
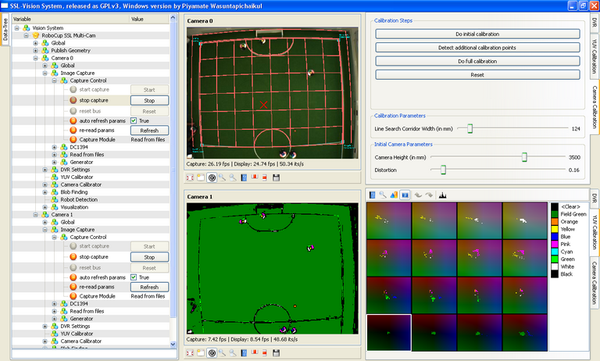
该平台从机器人足球比赛和实验研究的实际需求出发,制作了四轮蝶形分布的机器人运动机构,实现了机器人的多自由度全向移动,并设计了控球、击球等机械机构;针对运动机构的特点研究了机器人的运动控制算法,设计了以ARM和FPGA为核心的机器人的底层控制系统,构建了稳定可靠的机器人子系统;基于畸变校正、目标分割、图像识别等图像处理方法开发了适合于实验室场地的机器视觉系统;编写了机器人自主决策系统,对机器人行为进行预测判断、提供决策库支持、实现动态环境下的全局路径规划;设计了2.4G射频通信模块,构建该平台的无线通信系统,实现机器人子系统与上层决策控制系统之间的信息交换;此外,本平台还使用“平台/插件”软件体系构建了RoboCup小型组足球机器人的开放式仿真系统。
- 获奖情况:
第十二届“挑战杯”作品 二等奖
2009年,中国机器人大赛暨RoboCup中国公开赛,全国冠军;
2010年,中国机器人大赛暨RoboCup中国公开赛,全国冠军。