天津大学专区
基本信息
- 作品名称:
- 核磁共振环境下近距离粒子治疗手术机器人设计
- 大类:
- 科技发明制作A类
- 小类:
- 机械与控制
- 简介:
本作品以核磁共振环境下近距离粒子放射治疗手术机器人为对象,涉及医疗器械领域,属于机械控制与医学交叉的前沿学科。研究了机器人材料和驱动方式的选择、结构设计、运动学分析与验证、控制系统设计、视觉采集系统搭建等方面内容,辅助针刺轨迹优化及软组织动态仿真等相关项目的研究,并成功运用于仿生软组织针刺试验验证。
- 详细介绍:
本作品为核磁共振环境下近距离粒子治疗手术机器人设计,系本科生作品;在作品设计制作过程中,参赛作者共申请专利3项,其中发明专利2项,实用新型1项,发表论文3篇,均为核心期刊,其中一篇为SCI检索,两篇为EI检索;本作品先后与市肿瘤医院、市人民医院合作,并得到有关部门的大力支持。本作品同时得到了医疗手术机器人领域的国内外相关专家的指导和肯定。
本作品以核磁共振环境下近距离粒子放射治疗手术机器人为对象,涉及医疗器械领域,属于机械控制与医学交叉的前沿学科。研究了机器人材料和驱动方式的选择、结构设计、运动学分析与验证、控制系统设计、视觉采集系统搭建等方面内容,辅助针刺轨迹优化及软组织动态仿真等相关项目的研究,并成功运用于仿生软组织针刺试验验证。
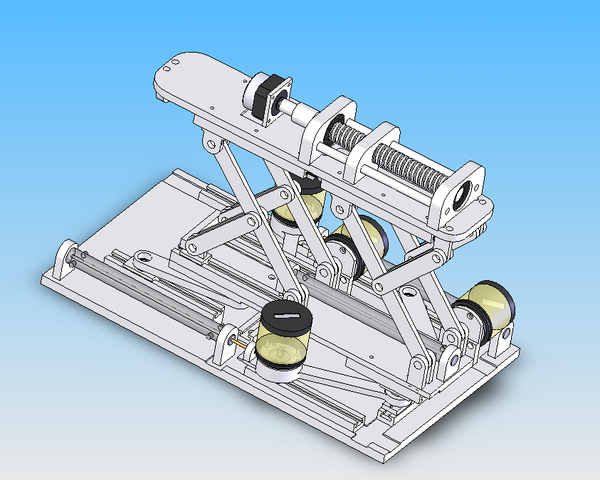
为了满足核磁兼容性的要求,整套机构采用高强度工程塑料聚甲醛(POM)制造。机器人采用模块化设计思想,两套Scott-Russell机构并联驱动一个动平台,即可实现平台平动和转动的两个自由度。针刺手术的五个自由度被分配在平动层、抬升层和针刺层中执行。将所设计模块同时运用于机构的平动层和抬升层,便可顺利实现机器人预定方向的运动。其中,平动层由两个滑块摆杆机构组成,每个滑块摆杆机构由一个核磁兼容气缸控制,可以实现水平面内的平动和摆动;抬升层由四个滑块摆杆机构组成,前后两套相对独立,每套由两个滑块摆杆机构组成,共用一个气缸控制,实现同步运动,而前后两套分别由不同气缸控制,实现异步运动;针刺运动,由丝杠滑轨机构,通过超声波电机的转动实现针体在水平方向的直线进给运动。
平动层和抬升层的共同运动可实现机构的上下、左右、倾斜、摇摆四个自由度的运动,从而实现针体空间位姿的调整;针刺层通过超声波电机的低速转动实现最终的针刺作业。
在控制系统设计阶段,分别采用气缸驱动来实现相对高速重载的运动;超声波电机实现高转矩低速均匀的针刺运动。针对气缸驱动,本控制系统采用高速开关阀来维持气缸两端气压的稳定。PC将程序传入PLC中来控制高速开关阀,从而调节各气阀开关的状态,实现针体空间位姿调整。同时,为了保证气缸运动的精度,在机构转轴位置安装光学编码器,将其所测转角转换为气缸运动位置反馈给PLC,构成闭环控制。针对超声波电机驱动,采用专门控制器来控制超声波电机的旋转速度、行程,同时配合气缸的调整,以实现精确控制针刺轨迹的目的。- 获奖情况:
第十二届“挑战杯”作品 三等奖
无