潍科专区
基本信息
- 作品名称:
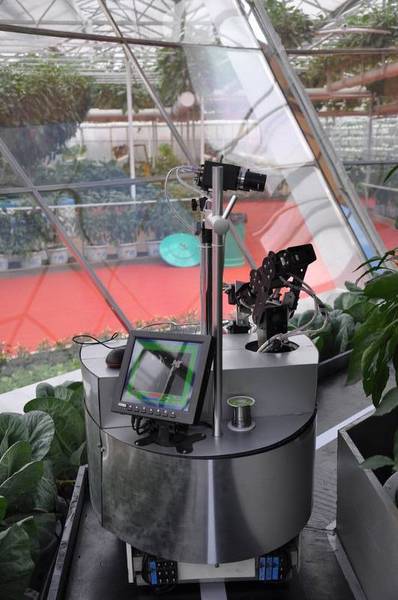
- 蔬菜管理机器人
- 大类:
- 科技发明制作A类
- 小类:
- 机械与控制
- 简介:
蔬菜管理机器人利用太阳能光伏板为机器人各个系统的运行提供动力能源,通过光纤传感器根据设定路线智能行进,先进的低温溶氧杀菌系统能够科学诊治病虫害,有效杀灭病原微生物。机器人通过视觉系统进行果实颜色与形状的识别,确定果实的位置,控制行进位置和机械手臂的采摘功能,并能完成自动充电,自动调节和监测蔬菜生长的温度、湿度和光照,进行无公害蔬菜的管理采摘。
- 详细介绍:
蔬菜管理机器人的主要研制内容:蔬菜管理机器人由生态能源供应系统、MCU核心控制系统、视觉定位系统、光纤导航系统、果实识别系统、采摘控制系统等组成。(一)能源供应系统能源是蔬菜管理机器人的动力来源,该系统的智能导航行进系统和果实颜色形状识别系统、环境检测系统、低温溶氧杀菌系统等多项功能的运行需要大量的能源。我们选用太阳能光伏板对机器人提供和储存能源,节能环保障机器人运行提供充足的动力。 机器人的能源系统是太阳能电池板将太阳能转换为电能,通过高能电池存储能量,当机器人电量不足时,导航运行系统控制机器人进行自动充电,通过光度传感器自动撑开折叠式光伏板,接受太阳能充电,充电完毕后,机器人可继续执行上次未完成的任务。试验表明:按当地蔬菜种植大棚面积80×10平方米计算,蔬菜管理机器人完成一次轨迹行进和成熟果实的采摘,需要的能源达8.3千瓦。(二)MCU核心控制系统 蔬菜管理机器人的主控制器包括数据采集系统和数据处理系统两部分,在制作蔬菜管理机器人的控制系统时,由于机器人主要在管理过程中完成多项功能的运行,主控制系统我们选取功能齐全、可靠、集成度高的MC68HC908AP64微处理器;总线工作频率8M,,64k flash存储器,8路10bit模拟输入口,4路timer输入,8位数据总线,一个普通SCI端口,一个红外SCI端口,一个SPI端口,一个通用并行I/O端口,具备中断和多种复位方式。该单片及功能强大,扩展能力丰富,通过其他逻辑芯片的扩展了5各数字量输入端口,5个模拟量输入端口和4个扩展槽。该单片机内部集成了存储器,不用扩展存储器,我们可以写入机器人程序;64k flash存储器,存储容量较大,适宜于我们根据机器人的不同任务更换不同的执行程序。该机器人的很多功能模块是基于这些通讯端口的,例如释放臭氧模块、无线通讯模块、环境检测模块等。在软件编程研究中,我们应用MOTOROLA软件,它可通过编写C语言程序来开发高层应用软件。(三)蔬菜管理机器人的低温溶氧生成系统由活氧管、变频器、电子制冷器、定时控制器等部分组成。实验表明,以空气为原料,在变频高压状态下产生的活氧,常温常压下为无色气体,当浓度达到15%时,呈淡蓝色,微溶于水,但我通过多次的对比试验发现,在不同温度下活氧在水中的溶解度不同,低温状态下,活氧在水中的溶解度高。为此,我们通过设计运用电子制冷器使水达到一定的低温,然后将产生的活氧充入到低温水中,可控制一定的溶氧效果.试验表明活氧是一种很强的氧化剂,活氧溶于水后,在蔬菜表面能直接氧化分解病原微生物内部氧化葡萄糖所必需的酶,从而破坏微生物的细胞膜将病原微生物杀死。0.80 mg/L的活氧水可杀灭空气中的芽孢等顽固性病菌。活氧杀菌与化学农药杀菌比较,其优势在于生物体内不存在任何药物残留,没有二次污染.根据试验,我们先通过电子制冷器把水温控制在7-8℃左右,再将活氧产生器产生的O3充入低温水中,目的是提高活氧水的浓度,达到杀灭病原微生物的效果。(四)利用活氧水喷雾杀菌系统是在蔬菜种植生产中,发生真菌、细菌、病毒等病害时,利用喷洒泵将一定浓度的活氧水均匀地喷洒到地面或蔬菜的表面,可有效杀灭蔬菜病原微生物. (五)视觉定位系统 蔬菜管理机器人的视觉导航包括三个方面,其一是视觉信息处理, 机器人视觉系统的CCD 摄像机采集外部环境场景中的图像, 从中提取导航特征。由于是室外作业, 要求图像处理算法具有实时性和很强的鲁棒性, 能够适应复杂多变的自然光线条件。其二是根据视觉信息处理得到的位置和姿态误差进行导航规划, 并由此产生操向角。由于图像处理数据量很大, 需要较长的计算时间, 因此图像处理的结果有较大的滞后。另外还有车辆行驶的速度, 车辆相对导航基准的初始姿态都对操向角有很大的影响。其三是伺服控制系统, 需要快速准确的完成操向控制指令, 通过执行机构完成转向, 其间要克服车辆导向轮与地面之间相互作用的影响。本文的机器视觉导航系统, 在顶部设有检测环境变化的摄像头,通过对环境地形的变化,实施对机器人进行指令导航,由于视觉导航的精确度很大部分取决于环境因素的变化,为保证其导航的精确程度并且配合底部的红外光纤传感器对路径偏差进行校正。(六)果实识别系统视觉上使用的是神经网络识别系统,由于神经网络技术具有很强的自适应性、学习性和容错性,因此被广泛应用于各个领域。该机器人的视觉识别系统,充分利用了神经网络的以上特点,将其应用于图像识别中,实现了对图像命令的识别,其中主要涉及到对真彩色图像的灰度化处理、二值化处理、字符的提取、校正、归一化处理。针对图像倾斜的情况,首先进行边缘检测,根据检测结果,再用霍夫变换法对图像进行倾斜度纠正。本系统采用 CCD 图像定位系统,配置2 个高速 CCD 相机,对蔬菜位置进行精确定位,并将定位坐标传输给机械手控制系统进行自动采摘作业。工作流程: 1:开机 等电脑开机完毕以及机器人开机完毕处于工作状态时,若要开始检测,则机器人向电脑发出指令(开始捕捉指令) 则处理软件进入捕捉扫描状态 2:当一号相机捕捉到辣椒处于屏幕中心位置时,二号相机判断辣椒的具体横向坐标,2个相机都捕捉成功的情况下,系统向机器人发送辣椒的相对坐标位置,此时机器人马上停止前进,并驱动机器手臂抓取辣椒。 3:当机器人操作机器手臂抓取辣椒并归位后,向系统发送开始捕捉指令,此时系统再次处于捕捉扫描状态。通信协议:电脑串口号:COM1 通信波特率:9600 数据位: 8 停止位:1 校验位:None 流控制:Non (七) 采摘控制系统果实采摘系统是由十二自由度手臂构成,关节由SM-S8166M舵机组成,主MCU将蔬菜三维坐标的数据传送给采摘系统,经过MCU计算确定果实的位置后,机械手根据定位系统的传输信息,进行升降伸缩完成蔬菜果实的采摘功能, (八)环境监控系统在蔬菜生产过程中,温度、湿度、二氧化碳和光照对生物的生长有着十分重要的影响,智能化病原菌防治系统不仅能够完成杀菌的功能,还能准确测量蔬菜大棚内的各种环境参数。我在病原菌防治器上安装了温度传感器用于检测大棚内温度;安装了湿度传感器用于检测大棚内空气湿度和土壤湿度;安装了光敏传感器用于记录作物的光照时间等。通过分析这些数据,便于进行科学栽培与管理,提高产量和改善蔬菜的品质。在设计制作中,为了便于直观的采样数据,我将这些模拟传感器连接到了模数转换器,通过模数转换后将数据输出结果读到单片机中,将传感器数据和标准仪器的读数作比较,这样的数据精度高、读数准确。
- 获奖情况:
第十二届“挑战杯”作品 三等奖
在第12届国际蔬菜科技博览会上进行展示,有30多家全国省市新闻媒体进行了报道,其中: 1.2011年3月23日新浪网报道《“机器人菜农”将亮相寿光国际蔬菜博览会》 2.2011年4月20日中国中央电视台CCTV在关于《第12届中国(寿光)国际博览会开幕式》的报道中着重强调了位于7号展厅的智能蔬菜栽培管理机器人,并认为其代表了本次菜博会的科技水平进一步提高。 3.2011年4月25日潍坊日报在专访《“机器人菜农”受追捧》中,对蔬菜管理采摘机器人进行了大篇幅的报道。 4.2011年5月4日中国移动通信网报道《第十二届中国寿光菜博会律动“科技芯”》。