武汉工程大学邮电学院专区
基本信息
- 作品名称:
- 双足机器人
- 大类:
- 科技发明制作B类
- 小类:
- 机械与控制
- 简介:
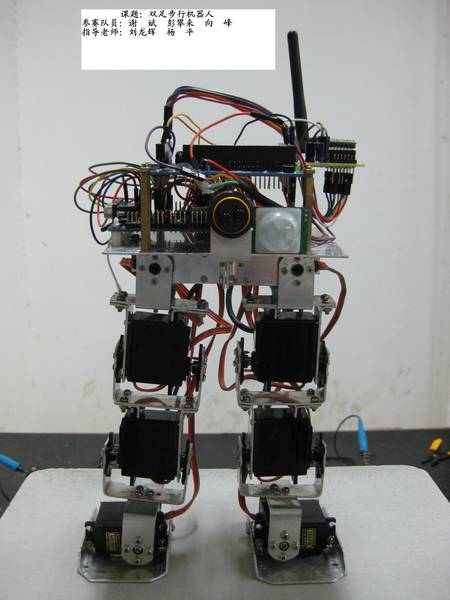
本系统设计的是一款能实现地震搜救的双足步行机器人,能够像人一样直立行走,且具有避障,定位,寻物,生命体探测等功能。系统采用了机械结构设计技术,多路舵机的控制技术,机器人步态规划技术,很好的解决了机器人行走平衡问题。同时系统还采用了无线视频传输技术,实时的将机器人探测的信息及时传送到控制中心,极大地方便了搜救工作。
- 详细介绍:
1.设计了一款八自由度的双足机器人,解决了双足步行机器人在行足过程中的平衡问题,能自如的控制机器人的行走。
2.开发了Cortex-M3 811单片机在机器人控制系统中的应用。
3.掌握了用PWM波来驱动多路舵机的方法。
4.实现了Cortex-M3 811单片机与舵机控制器之间的串行通信。
5.用红外避障模块实现了机器人的避障功能。
本作品采用了Cortex-M3 811单片机作为控制核心,舵机控制器作为副控,通过串口通信产生多路PWM波来驱动舵机运转。步行机器人的研究的难点主要表现在如下两个方面:腿部结构的设计非常复杂,因为要考虑结构的紧凑、轻巧、高的关节力矩、大的关节活动范围、低反冲和摩擦等问题:系统本身存在不稳定性,要有有效而安全的控制方法,不允许跌摔。- 获奖情况:
第十二届“挑战杯”省赛作品 省赛三等奖
无