太原科技大学专区
基本信息
- 作品名称:
- 基于车载自适性平台的自动喷洒农药机
- 大类:
- 科技发明制作B类
- 小类:
- 机械与控制
- 简介:
针对我国缺乏相对高效廉价施药机具的现状,以创新、实用、经济和环保的设计原则,研制出一种适用于精细农业的高效轻便型自动喷洒农药机,在单片机的基础上给出了车载自适性稳定平台、喷洒系统及遥控系统的设计方法与解决方案。试验表明该机系统简单,性能良好,占地空间小,布置方便,动力消耗小,环境友好,较好地解决了人机分离作业,提高农药有效利用率,改善农业生态环境等问题,进而提高了农机品质。
- 详细介绍:
作品设计的基本思路
(一)自动喷洒农药机的结构设计
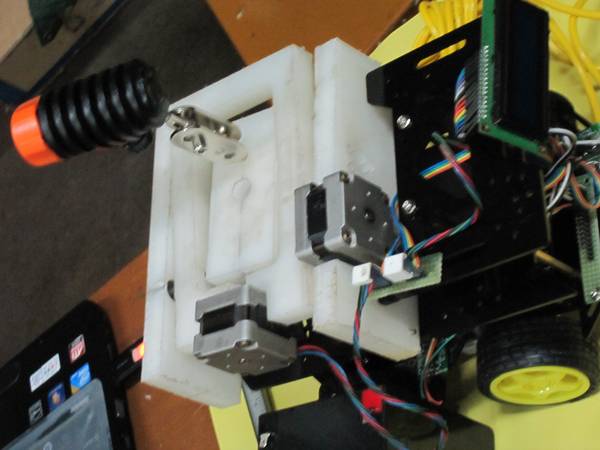
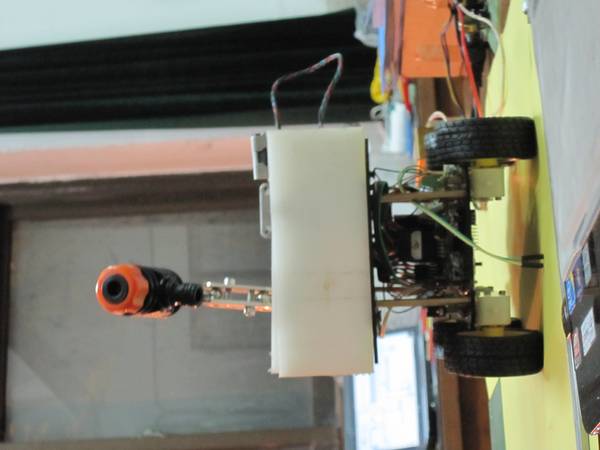
1、车载自适性稳定平台机械机构设计车体在田地中作业,为避免车体摇摆对喷头指向的影响,采用自适性稳定平台,喷枪杆臂安装在内框架上,内框架支承在外框架上,其旋转轴线垂直车体的首尾线;外框架又支承在基座上,其旋转轴线平行且偏置于首尾线。基座架固定在车体上。
2、喷头的结构设计长度不同的喷枪杆臂的可根据不同的需要安装稳定平台上,喷头安装在杆臂顶部,喷头体上安装多个小喷嘴,通过调整小喷嘴轴线之间的夹角来调整喷嘴的喷雾方向。
(二)自动喷洒农药机检测与控制系统设计
(1)传感器层的设计
本系统采用单轴陀螺仪ENC-03模块,为单轴角速度传感器。
横摇结构包括横摇步进电机、横摇轴、内框;纵摇结构包括:纵摇步进电机、纵摇轴、外框。横摇、纵摇轴上各安装一个陀螺仪传感器,当平台倾斜时,分别感应出横摇轴、纵摇轴的角速度,经积分处理后转换成角度,并产生正比于偏角大小的信号。
(2)信号采集执行层、显示层、控制层的设计
由于陀螺仪送出模拟信号,须经信号采集单元采集,即将A\D模块转换后送到处理单元.多次采集取平均值消抖。
本系统采用AVR单片机对纵横摇信号进行处理,输出控制信号。高性能低功耗的AVR具有先进的RISC结构:133条指令,大多数可以在一个时钟周期内完成;32*8 通用工作寄存器加外设控制寄存器;工作于16MHZ时性能16MIPS。
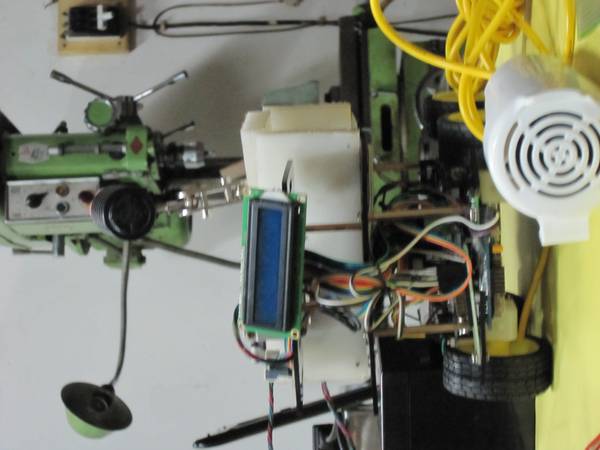
采用显示模块,显示出横纵摇偏转角度,方便观测调节动向。
单片机输出的控制信号给L298的四个输入端,四个输出端接两相四线步进电机,控制步进电机正反转实现调节。
(3)小车遥控系统的设计
采用单片机和套装摇控芯片实现。主要由发射模块,接受模块,驱动模块,及单片机组成。控制部分主要考虑按键的设计,遥控器上的5个控制键控制遥控车的运动,分别是:前进、后退、向左、向右、停止。小车通过接受遥控器发来的信号来完成相应的动作。三、作品的创新点
应用自适性稳定平台和遥控技术实现智能喷洒的设计方案,解决农业机具精确定位喷洒问题是国内外首创。
四、作品的技术关键
(1)本系统自适性平台设置为轴心偏置结构,缩小了占地空间,减轻了平台的重量便于电机的驱动。其技术关键在于确定两个轴向的平衡位置。
(2)系统的控制策略是关键,设计适合的控制器,提高整个稳定平台的控制精度。
五、作品主要技术指标
(1)方位驱动范围为±60°;俯仰驱动范围为- 60°~60°。
(2)自适性平台可在平台倾角小于等于60°范围内任意位置能锁定。
(3)电机运动速度:方位运动速度为0 . 1°/ s~2°/ s ;俯仰运动速度为0. 1°/ s~1. 5°/ s 。
(4)抗风能力:风速10 m/ s 喷杆正常工作;风速12 m/ s 喷头降精度工作;风速16 m/ s 农药机有倾覆危险。
(5)最大遥控范围:100m。- 获奖情况:
第十二届“挑战杯”作品 三等奖
2011年5月15日,设计的模型参加了太原市知识产权局举办的第八届太原市青少年发明创新竞赛及展示活动,并得到了一致好评。