
作者:2017级本科生 蔡烨怡 所属院系:自动化系
指导老师:赵杰亮 所属院系:机械系
关键词:脑机交互、半生物机器人
摘要
蜜蜂在飞行灵巧性和环境适应性上都远超现有的微型飞行器。本项目展示了一种通过脑机接口进行飞行运动控制的半机械蜜蜂。将可遥控的微机电系统和蜜蜂生物体结合。上位机指令由红外信号转换为电信号,经MCU处理,产生特定的刺激序列,通过微电机被传送到蜜蜂的两侧视叶,模拟视觉信号刺激,使得蜜蜂产生制定的振翅、转向行为。
项目背景
昆虫-机器接口是近年快速发展的一项新技术,有望解决人造微型飞行器所遇到的瓶颈。这种技术基于脑机接口(BCI)或神经-机械接口,通过建立微电子机械系统与昆虫神经系统或肌肉系统的相互融合,实现神经电刺激,进而遥控昆虫自身的飞行运动。随着电子技术的发展,电路的集成度快速提高,体积、质量减小,这为输出精细指令的无线通讯系统提供了技术可能性。这种结合了可控的微机电装置和高灵活度的昆虫生物体的系统,又称为昆虫机器人。基于脑机接口的生物机器人,涉及生物、医学、计算机、通信等众多领域,是一个交叉的研究方向。随着电子技术和脑科学的发展,动物士兵、昆虫士兵相继出现,一些辅助诊断和辅助治疗的系统在医学上开始越来越广泛的被应用。

图 1半机械蜜蜂示意图
主要内容
本项目采用蜜蜂作为飞行载体,以微控制器为核心元件集成飞行背包。项目主要分成三个部分。首先通过蜜蜂脑部视叶植入微电极丝,采集蜜蜂在光暗刺激和光亮刺激下的脑电位变化,总结视觉信号对蜜蜂脑部电位的影响。而后,通过固定和半自由状态下的刺激实验,得到不同刺激信号下的起飞成功率、振翅频率、摆腹情况等数据,对比得到最佳刺激方案。同时,测试蜜蜂的载重能力、观察蜜蜂的飞行运动特性,通过实验找到一种最佳的生物 -机械耦合方式。后期根据得到的参数设计电路,设计和制作集成微型控制系统。最后将蜜蜂与飞行控制系统固定,进行综合调试,完成生物-机械系统的整合。
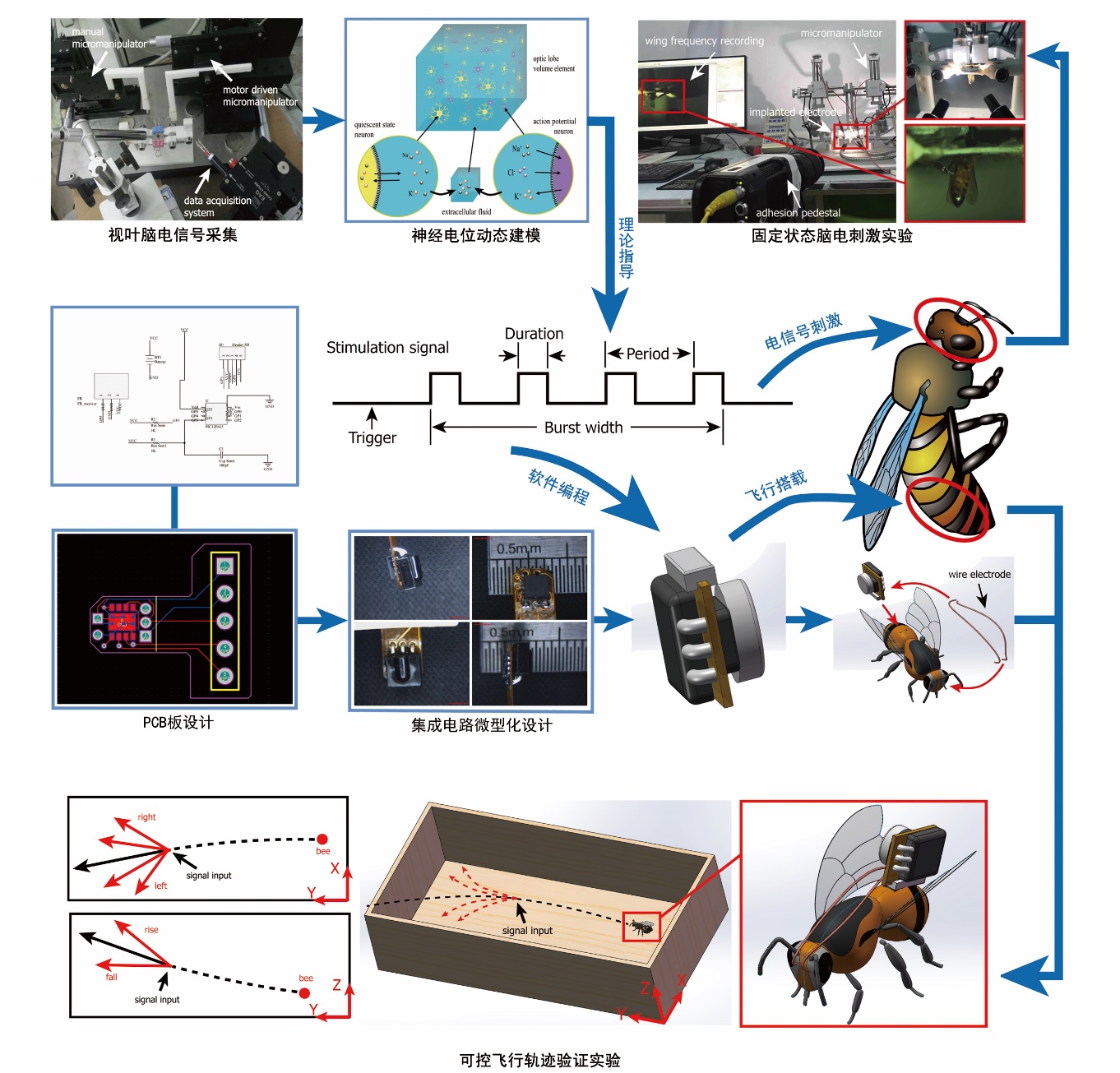
图 2研究方法
主要成果
(1)积累了蜜蜂视叶光刺激下的脑电信号实验数据,总结规律并建立动态模型仿真。
(2)对现有的飞行控制电刺激参数进行了验证、优化。
(3)完成了飞行控制背包的微型化,支持无线通讯,集成电路面积仅5.3mm*6mm,重量仅190mg。
本项目的研究成果在昆虫士兵、可控授粉、生态学研究等方面有广阔的应用前景。




