江苏师范大学专区
基本信息
- 作品名称:
- 无人机航空摄影测量规划与导航系统
- 大类:
- 科技发明制作A类
- 小类:
- 信息技术
- 简介:
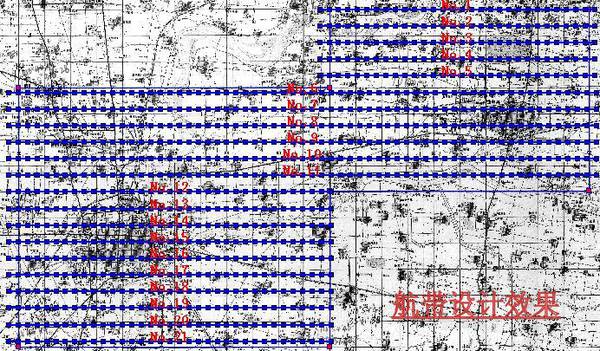
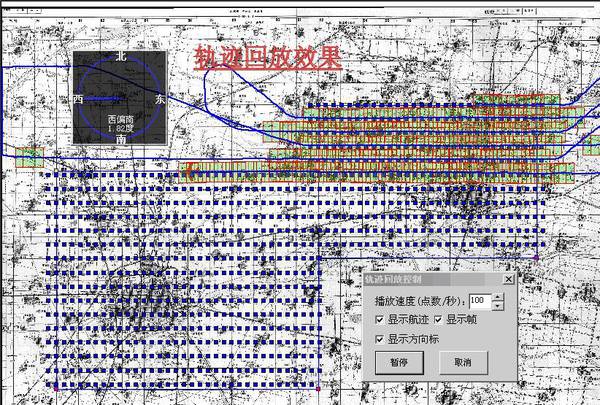
无人机航空摄影测量规划与导航系统是一个基于GPS和GIS的无人机航测遥感作业软件。主要完成航带规划设计、导航、轨迹回放、漏拍区分析等功能。系统设计功能包括:在执行航拍任务之前,按照作业需求自动完成飞行计划的制作;在飞行过程中,实现拍摄作业的实时可视化操作;在飞行作业完成之后,可以在电子地图上重现飞行过程、分析漏拍等。该系统具有高度自动化、高效率、高精度和低成本的特点,在应用上具有广阔的市场优越性。
- 详细介绍:
无人机航空摄影测量规划与导航系统是一个基于GPS和GIS的无人机航测遥感作业软件。主要完成航带规划设计、导航、轨迹回放、漏拍区分析等功能。系统的设计目标是:在执行航拍任务之前,按照作业需求自动完成飞行计划的制作,包括飞行路线和航拍点的布设等;飞行过程中,实现拍摄作业的实时可视化操作,动态显示的项目包括当前拍摄点的位置、相幅覆盖范围、飞机当前飞行方向、飞机当前经纬度坐标以及海拔高度等,以辅助操作人员高质量地完成飞行及拍摄任务;飞行作业完成之后,可以在电子地图上重现飞行过程、分析漏拍和不符合重叠率要求的区域,迅速找出需要补拍的区域,必要的时候可以根据分析结果立即进行补拍。该系统具有高度自动化、高效率、高精度和低成本的特点,在应用上具有广阔的市场优越性。
- 获奖情况:
第十二届“挑战杯”作品 二等奖
1、作品获奖情况:在2011年4月获得XX大学“挑战杯”全国大学生课外学术科技作品竞赛校内选拔赛一等奖。
2、作品应用情况:“南京市第二次土地调查更新项目中部分地区航空摄影测量”:在2009年12月—2010年2月期间使用该系统完成了南京市第二次土地调查更新项目中部分区域的航空摄影测量。