安徽工程大学专区
基本信息
- 作品名称:
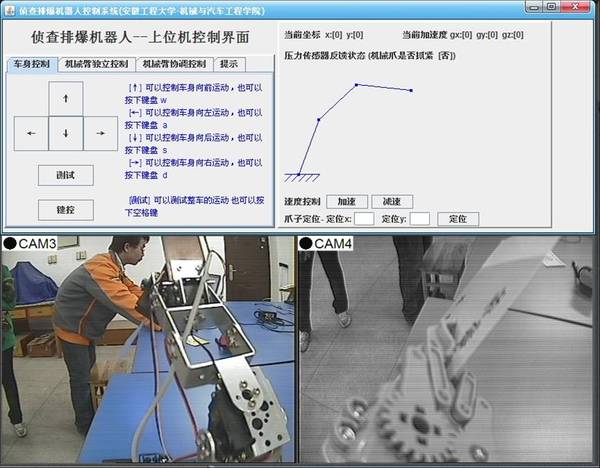
- 侦察排爆机器人
- 大类:
- 科技发明制作B类
- 小类:
- 机械与控制
- 简介:
此方案设计的侦查排爆机器人能够实现两路视频图像的无线传输,经采集卡用上位机在电脑上显示实时图像,通过两路视频可以准确定位.控制部分是基于windows 操作系统用电脑键盘远程控制小车的运动以及机械手的操作,并可发送特定的指令,应变能力比较强。另外,我们机器人采用的是闭环控制,可以在上位机显示三轴加速度传感器反馈来的机械臂的运动信息;压力传感器反馈来的机械臂夹紧信息.
- 详细介绍:
详见论文
- 获奖情况:
第十二届“挑战杯”省赛作品 省赛二等奖
校级一等奖