哈工程专区
基本信息
- 作品名称:
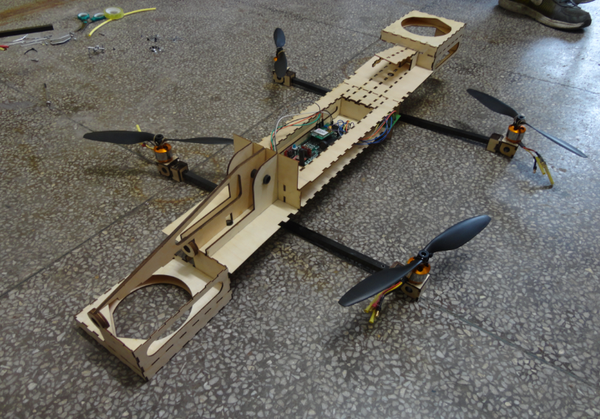
- 可自重构的集群飞行机器人
- 大类:
- 科技发明制作A类
- 小类:
- 机械与控制
- 简介:
针对传统无人机集群编队飞行在对大面积区域精确探测遇到的问题提出了一种全新的解决方案,即通过多个无人机自主拼接组合和分离,提高长时间集群飞行的可靠性,增强无人机群飞行稳定性并提高飞行效率。在对大面积目标进行探测和侦察时能够提高侦察效率和精度。
- 详细介绍:
针对传统无人机集群编队飞行在对大面积区域精确探测遇到的问题提出了一种全新的解决方案,即通过多个无人机自主拼接组合和分离,提高长时间集群飞行的可靠性,增强无人机群飞行稳定性并提高飞行效率。在对大面积目标进行探测和侦察时能够提高侦察效率和精度。
需要对较大面积区域或是一栋建筑的内部进行探测时,本设计中的多个飞行机器人首先会拼接成一个整体,目的是在从基地飞往任务区的较长距离的飞行中增加飞行稳定性并提到飞行效率。当到达执行任务的区域后再分离为单一个体分头执行任务,目的是能更高效的对目标区域完成探测,在最短时间内完成任务。当探测结束后多个飞行机器人再次自动拼接成为一个整体并返航,整个任务完成。- 获奖情况:
第十二届“挑战杯”作品 三等奖
无