燕山大学专区
基本信息
- 作品名称:
- 机器人手腕力觉感知系统
- 大类:
- 科技发明制作A类
- 小类:
- 机械与控制
- 简介:
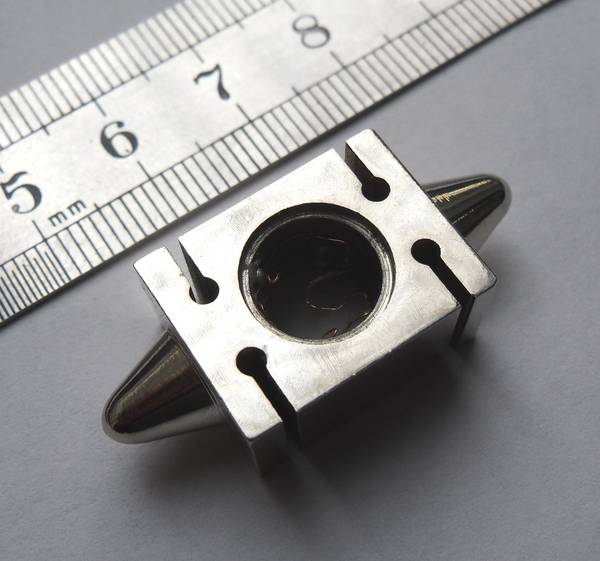
机器人手腕力觉感知系统由腕力传感器、数据采集卡、PC微型计算机和信号采集、数据处理软件等组成。腕力传感器是该系统的核心单元,其结构采用双层预紧式设计方案,以球窝锥头式球面副替代传统球面副并实施整体预紧,集结构稳定、应力耦合低、刚度大等特性于一体。实验结果表明该系统具有较高的测量精度,可应用于机器人精密装配、轮廓跟踪、去毛刺等与环境接触的场合,可以满足现代工业生产对机器人技术提出的诸多要求。
- 详细介绍:
机器人手腕力觉感知系统是机器人在执行与环境接触任务时必不可少的单元,它可实时检测机器人末端的受力情况,使得机器人具有力觉感知能力,以便机器人更好的执行与环境接触的任务,广泛应用于机器人精密装配、轮廓跟踪、磨削和去毛刺、抛光和擦洗等与环境接触的场合。机器人手腕力觉感知系统由腕力传感器、数据采集卡、PC微型计算机和信号采集、数据处理软件等组成。其核心技术是腕力传感器的结构设计。它采用双层预紧式设计方案,以球窝锥头式球面副替代传统球面副并实施整体预紧,集结构稳定、应力耦合低、刚度大等特性于一体。机器人手腕力觉感知系统的信号采集、数据处理软件采用LabVIEW软件开发,可对机器人末端接触力实时检测和显示。实验结果表明该系统具有较高的测量精度,将其加在传统的机器人本体上能够使机器人具有高精度的力觉感知能力从而完成各种精密作业,是提高机器人档次的理想途径,可以满足现代工业生产对机器人技术提出的诸多要求。本作品对于我国工业生产领域的发展和实现机器人自动化、智能化、实用化等方面具有一定的科学意义和应用价值,具有很广阔的市场前景和经济效益。
- 获奖情况:
第十二届“挑战杯”作品 二等奖
作品于2011.01.16完成装配测试,实验结果表明该机器人力觉感知系统具有较好的测试性能,各项技术指标均达到要求。