华北理工大学专区
基本信息
- 作品名称:
- 基于单目CCD的遥控挖掘机铲斗姿态识别
- 大类:
- 科技发明制作B类
- 小类:
- 机械与控制
- 简介:
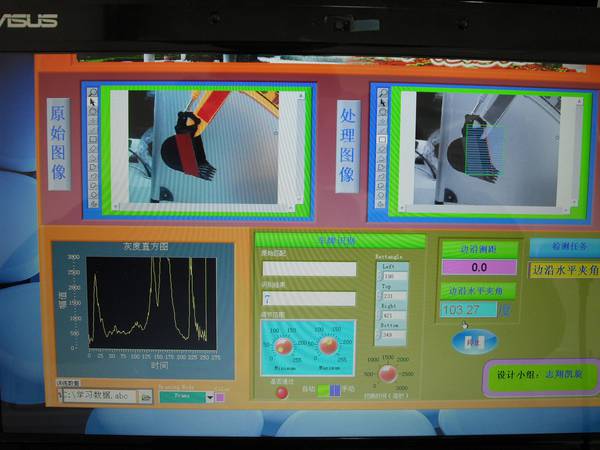
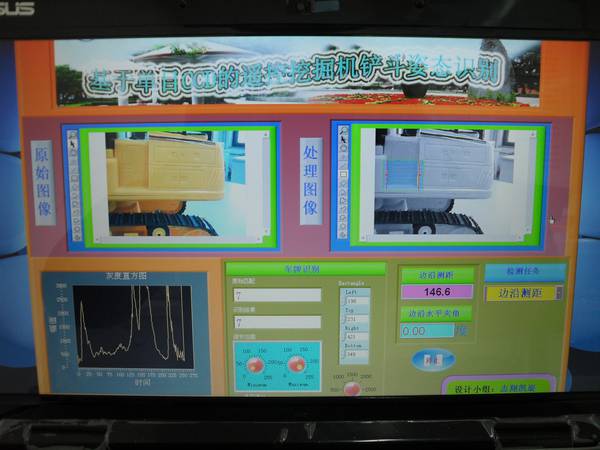
本作品利用单目CCD采集挖掘机的单帧静态图像,经过图像增强、二值化、滤波有效地提高了图像的清晰度。同时,也利用了直方图对图像的阈值选取进行有效的设定。本设计采用了NI公司的Labview 8.6软件和NI Vision组件对挖掘机进行了车牌识别,以便准确地确定所使用的挖掘机,为后期车辆使用状况的数据库做准备。为了能够准确辨识挖掘机的挖掘臂位姿,进而设计了边沿测距,边沿与水平夹角的功能。
- 详细介绍:
近年来,随着矿业和重工业生产规模的快速发展,挖掘机将担负起重要的挖掘开采任务。考虑到工矿作业环境经常存在一定的危险性,就需要进行无人化远程操作。这就需要及时获取挖掘机工作时的不同位姿特征,进而实现有效地远程操作。本作品是针对无人远程操作的前期核心任务——图像特征提取,进而获得精确、有效的数据,更稳定地进行远程监控和无人化控制。
本作品利用单目CCD采集挖掘机的单帧静态图像,经过图像增强、二值化、滤波有效地提高了图像的清晰度。同时,也利用了直方图对图像的阈值选取进行有效的设定。本设计采用了NI公司的Labview 8.6软件和NI Vision组件对挖掘机进行了车牌识别,以便准确地确定所使用的挖掘机,为后期车辆使用状况的数据库做准备。为了能够准确辨识挖掘机的挖掘臂位姿,进而设计了边沿测距,边沿与水平夹角的功能。这些功能的设计可有效地获取目标图像特征,也是无人化远程系统设计的关键核心所在。
本作品利用了单目CCD摄像头远距离测量,节省大量检测器材。无需人员现场作业,更安全,而且精确度更高,也为无人化自动智能操作做了前期准备。同时,利用了Labview 软件的稳定性、灵活性、及时性和高性价比等优点,便于对整个系统及时升级更新,提高了系统的鲁棒性和适应性。利用以上这些优势大大降低了整个系统的成本投入,缩短了系统开发周期,提高产品收益。这也说明了机器视觉将是未来产品检查、测量和识别发展的必然趋势。- 获奖情况:
第十二届“挑战杯”省赛作品 省赛二等奖
作品参加了由清华大学、“中国仪器仪表学会虚拟仪器与网络化系统分会”、“中国仪器仪表学会电子测量与仪器分会”、“精密测试技术及仪器国家重点实验室”共同承办,美国国家仪器(NI)公司协办的2011年全国虚拟仪器设计大赛。