太原科技大学专区
基本信息
- 作品名称:
- 基于挖掘机姿态实时显示技术的挖掘辅助系统
- 大类:
- 科技发明制作B类
- 小类:
- 机械与控制
- 简介:
当前挖掘机操作方式只依靠驾驶员在驾驶舱内单一视角观察铲斗动臂等姿态,有诸多局限。本系统通过对挖掘机的姿态进行检测,并将其实时显示,便于驾驶员在更宏观的高度观察、操控挖掘机。
- 详细介绍:
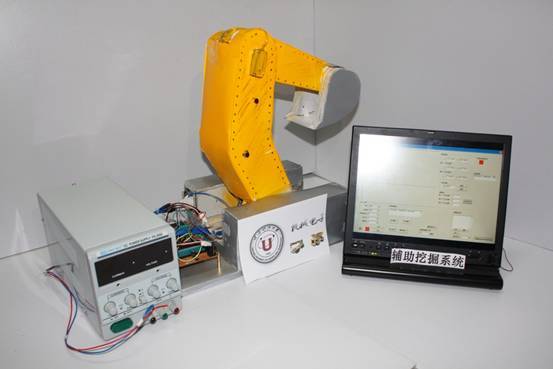
挖掘机实时姿态显示是挖掘机器人实现作业状态遥控的重要组成部分,可减轻挖掘机驾驶员的劳动强度,为驾驶员的精确挖掘提供指导,同时该系统还实现了挖掘机的遥控作业,以使驾驶员在安全的位置操控挖掘机,避免置身于危险环境中遭受人身伤害。解决特殊危险场合的作业问题,是现代工程机械的一个研究方向。
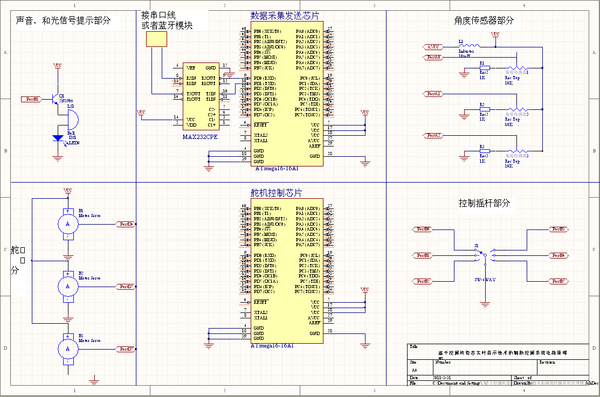
本系统通过对安装在挖掘机铲斗、斗杆、动臂的主要铰接点的角度传感器,给位于驾驶员面前的上位机提供角度参数,使之绘出当前挖掘机的姿态图像。驾驶员通过上位机输入预定挖掘坐标,系统为驾驶员的操作提供图像参考。当挖掘机铲斗到达预期目标,系统予以图像与声音提示,让挖掘工作在程序计算的精确辅助下更好更高效的完成。- 获奖情况:
第十二届“挑战杯”作品 三等奖
2010年太原科技大学大学生创新性实验项目