适应复杂管道的一体化杆式管道机器人
作者:2016级本科生 余畅 孙杨昌 项云威 机械工程系
指导老师:韩赞东 机械工程系
关键词:管道机器人 杆式机器人
摘要
此管道机器人采取一种新的过弯原理,通过减少机器人的驱动轮数,避免了传统机器人过弯的难点。该机器人主要针对管道中大角度水平弯头、竖直弯头、T型三通管道、斜三通管道等,能够灵活通过多种复杂管线。
整体结构
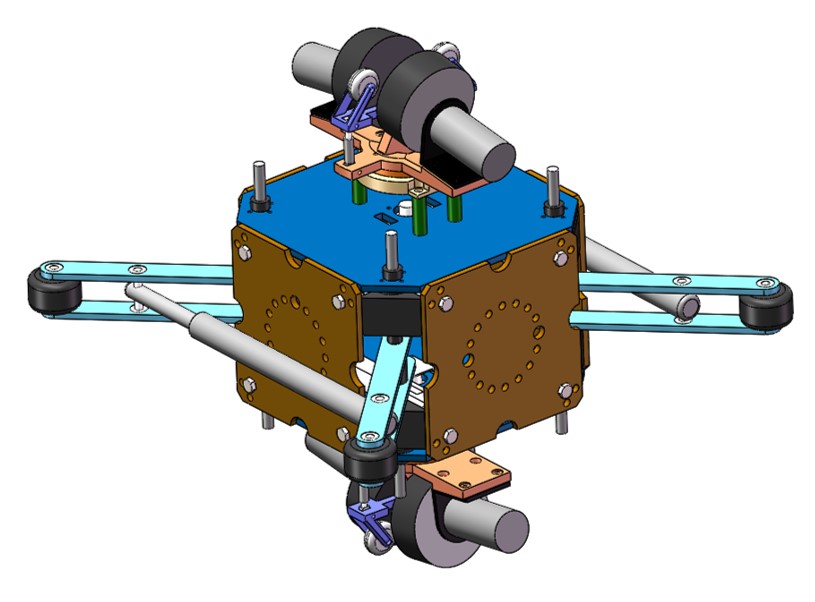
整体结构采用单节一体化设计,主体内部集成了控制电路模块,两侧的驱动机构负责驱动机器人,四周的辅助支撑机构负责协助调整稳定机器人姿态。

图1 系统原理图
驱动结构
由大减速比电机构成,采用双侧双轮的设计,能够灵活调整姿态,减小其转弯半径。同时,驱动机构能够相对主体旋转90度,从而使得机器人可以绕管轴线旋转,能够调整姿态,使机器人水平、竖直甚至螺旋前进。

图2 驱动结构原理图
支撑调节机构
为维持机器人在管道中的姿态,在机器人周围加装四条支撑腿,末端安装万向从动轮,相邻两条支撑腿之间通过电动推杆连接并控制,从而保证机器人轴线与管道轴线平行。

图3 支撑结构原理图
反馈控制
为维持机器人在管道中的姿态,在机器人周围加本项目机器人采用Arduino UNO单片机控制,包含6个直流电机、3个直流电机驱动模块、2个角度传感器、1个姿态传感器和1个蓝牙通讯模块。
角度传感器用于监测驱动机构的旋转平台相对机器人主体发生转动的角度,以实现机器人原地旋转的功能。
机器人还采用姿态传感器确定机器人在管道内的姿态,包括俯仰、倾斜的角度等数据,从而控制机器人针对不同管线情况做出姿态调整。

图4 控制框图

图5 机器人在管道中的效果图




