西安电子科技大学专区
您现在的位置:专区首页 >> 优秀作品
优秀作品展示
-

本作品设计了一个具有远程替身和室内服务管家两方面功能的室内服务系统。以中央机器人为核心,以外围的体感控制器和ZigBee网络为支持。可以满足人们对室内服务智能化、人性化的需求。作品在保留传统控制方法的基础上增加了体感及语音控制设备,使得室内服务和远程替身功能更加便于操作和使用。同时,远程替身可让远程...
-

本项目是一台履带式双机械臂机器人,主要可执行地震救援、排爆、特殊环境检测和侦查等危险工作。双机械臂采用电动推杆驱动,单臂负载力达到30kg。结合短距离和中远距离无线传输方式,保障机器人在1500m范围内的无线控制。该机器人可携带有效载荷150kg,最大速度为35m/min,攀爬30°斜坡。利用...
-

轮式/四足可变形智能侦察机器人是一款能在较复杂地形环境下行走运动的侦察机器人,它是在轮式运动的车体上增加四足行走机构,通过车体变形达到行走模式转变的目的,该机器人将轮式行走和四足行走两种运动形式相结合,前者适于平坦地面的轮式快速移动,后者适于较复杂地面(如废墟)上的四足行走。同时可通过自行设计的手持...
-
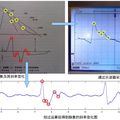
中医在实施脉诊时靠的是多年积累的主观经验,限制了脉诊技术的推广应用和发展。因此,脉诊的数字化对继承和开拓现代中医学有着重要意义。本系统采用中医三部九候诊法,使用脉象采集系统对脉象信息进行实时、精准地采集,并进行存储,使用智能终端作为通信设备来实施安全的传输,在后台利用智能信息处理技术对脉象信息进行分...
-

为了适应目前各种显示媒介尺寸的多样化,需要对视频图像进行高质量的非等比例缩放处理。为了使视频图像在进行非等比例缩放时,不产生明显的视觉感知畸变,本作品提出了一种基于内容感知技术的视频图像幅型比非等比例变换的技术,在图像中定义与视觉敏感性相关的能量线,通过删插能量线的方法完成图像的非等比例缩放,...
-

这篇论文中,我们提出了一种基于球面像差效应和压缩感知理论的低采样阵列高分辨率成像方法。其基本过程是原始物体(场景)通过具有显著球面像差的特殊光学系统进行光路混叠,然后经过较低规模的采样阵列降采样,采样的数据经过图像重构得到较高分辨率图像。